Camera Field of View Test

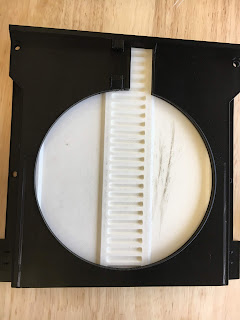
Objective: To test which GoPro field of view if most optimal for the side camera to record the tray opening and closing. Gaining footage of the horizon is also a secondary goal. Method: GoPro Hero 3+ Silver, the camera that will be used for the sides, was mounted in its casing and payload box to simulate recording on the day of the flight. A previous model of the petri dish assembly will be positioned at various distances on the side. A ruler was used to measure the distance of the payload from the petri dish assembly to record different distance possibilities. The camera was recorded at 1080p and 60fps. Camera mounted into the new, lightweight casing. Using a standard ruler to measure distance. Below is a diagram of all the possible frames of second and fields of view for each resolution within GoPro Hero 3+ Black, the camera that will be used for the top. It has been determined for the side camera to record at 60fps at 1080p, in which t...